RTCP在诸如胶合,去毛刺,RTCP在诸如胶合,去毛刺,缝纫,抛光等许多工艺应用中,通常更容易用机器人拾取零件并以固定工具(例如砂带,去毛刺工具,缝纫机,抛光轮等在机器人的末端拾起砂带并移动它毕竟不是很方便。或者您可以想象将一台缝纫机连接到机器人手臂的末端并移动它。
这些工具不仅通常很重,而且通常也不是为与机器人集成而设计的,因此可能需要大量的设计工作或定制。协作机器人的整体理念是它们灵活且易于使用。
但配药怎么样?事实上,有机器人分配末端执行器可用。是的,但如果您使用机器人移动点胶末端执行器,那么您可能还需要一些其他自动化功能来将部件从胶合机器人前面移出。只有一个机器人进行材料处理并将零件展示给固定的胶合分配器会不会更容易?在某些情况下它是。这些只是Polyscope 5.4中新的,超级易用的远程TCP功能的一些例子。
远程工具中心点(通常称为远程TCP或RTCP)使用户能够相对于固定(远程)TCP编程圆移动和路径点。然而,这些熟悉而简单的命令解锁了幕后发生的强大计算魔法。系统计算如何控制机器人的速度,加速度和减速度,以在RTCP上实现零件的恒定速度。如果没有RTCP功能,特别是在零件边缘的圆弧周围进行编程非常具有挑战性。它可以使用非常小的步骤和一些微调来完成,但这可以导致数千行的程序。其他替代方案可以通过演示或离线机器人编程软件来教授。但那些可能是不精确/难以微调或昂贵/需要学习完整的编程环境。RTCP功能嵌入在eSeries机器人中,这些命令直接插入编程树中,因此无需额外学习即可使用该功能。这很精确。运动平稳流畅,每次运动的执行之间没有停止或暂停。
查看使用RTCP功能创建的这两个演示。
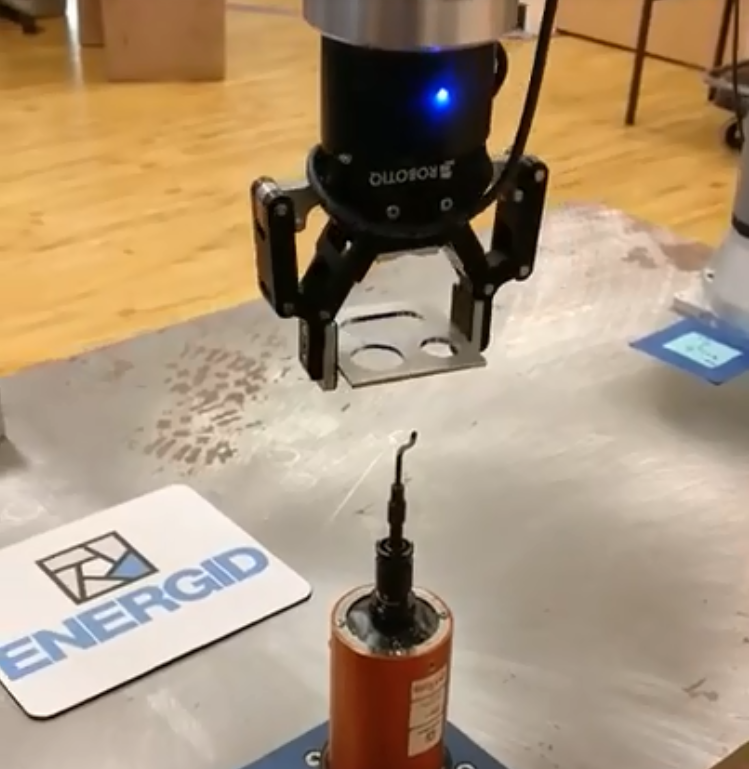
第一个演示中, ATI兼容去毛刺刀片(CDB) 固定在工作台上。配备Robotiq 2F-85自适应夹具的UR10e机器人,将金属部件呈现给ATI CDB,以去除内部特征。机器人相对于ATI CDB以恒定速度移动零件。
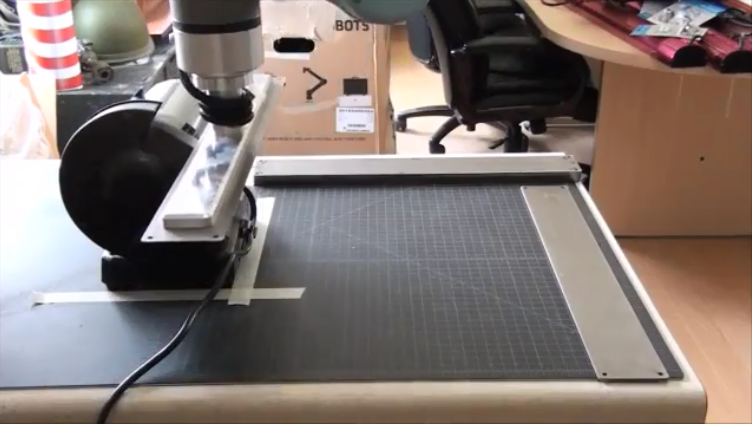
第二个演示中,轮式砂光机固定在工作台上。UR10e机器人配备定制真空末端执行器,一次拾取一个金属板,并将该部件呈现给砂轮打磨机以去除外部轮廓。机器人能够以相对于砂光机的恒定速度移动零件。